


















_1746866658_1747125127.png)
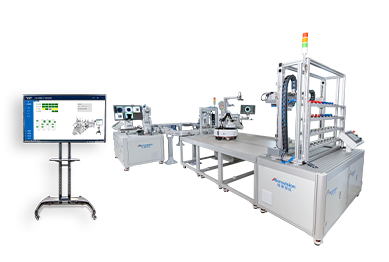
机械手视觉系统
维视智造机械手视觉系统MV-VPS系列,是一套针对机器人定位场景的完整、标准化解决方案,系统以高精度相机实时获取抓取对象坐标,精准映射至机械手坐标系,实现毫米级智能定位抓取
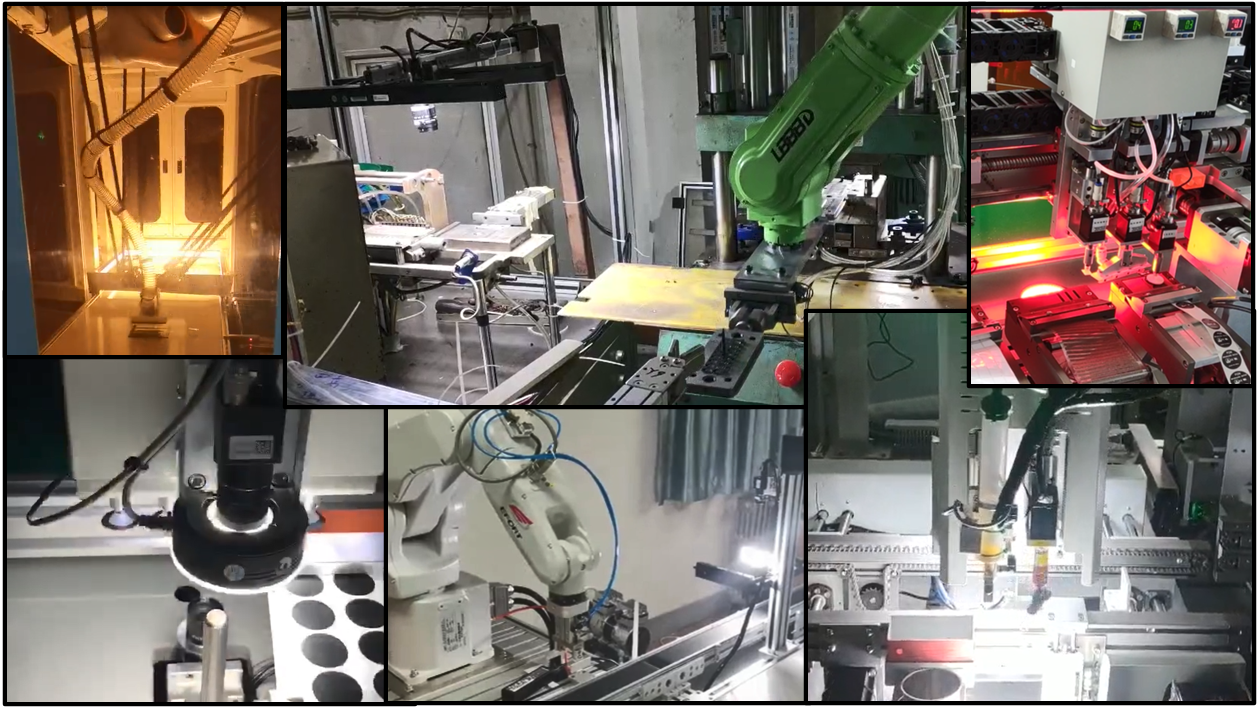
适用场景
“眼”在“手”外定位
相机安装在流水线上方,引导机械手抓取
图例:相机独立安装于线体上,给机械臂末端预留充足空间设计夹具
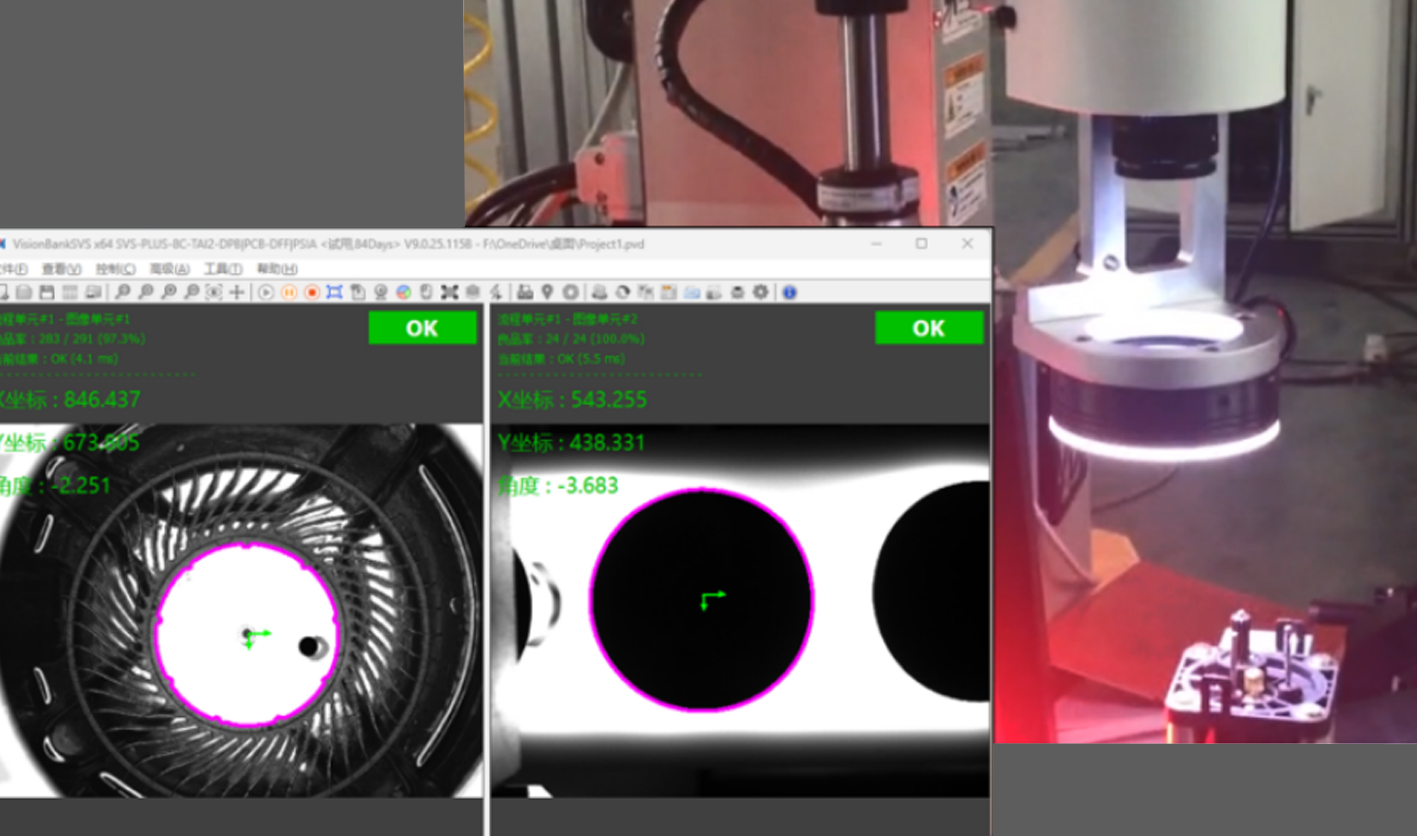
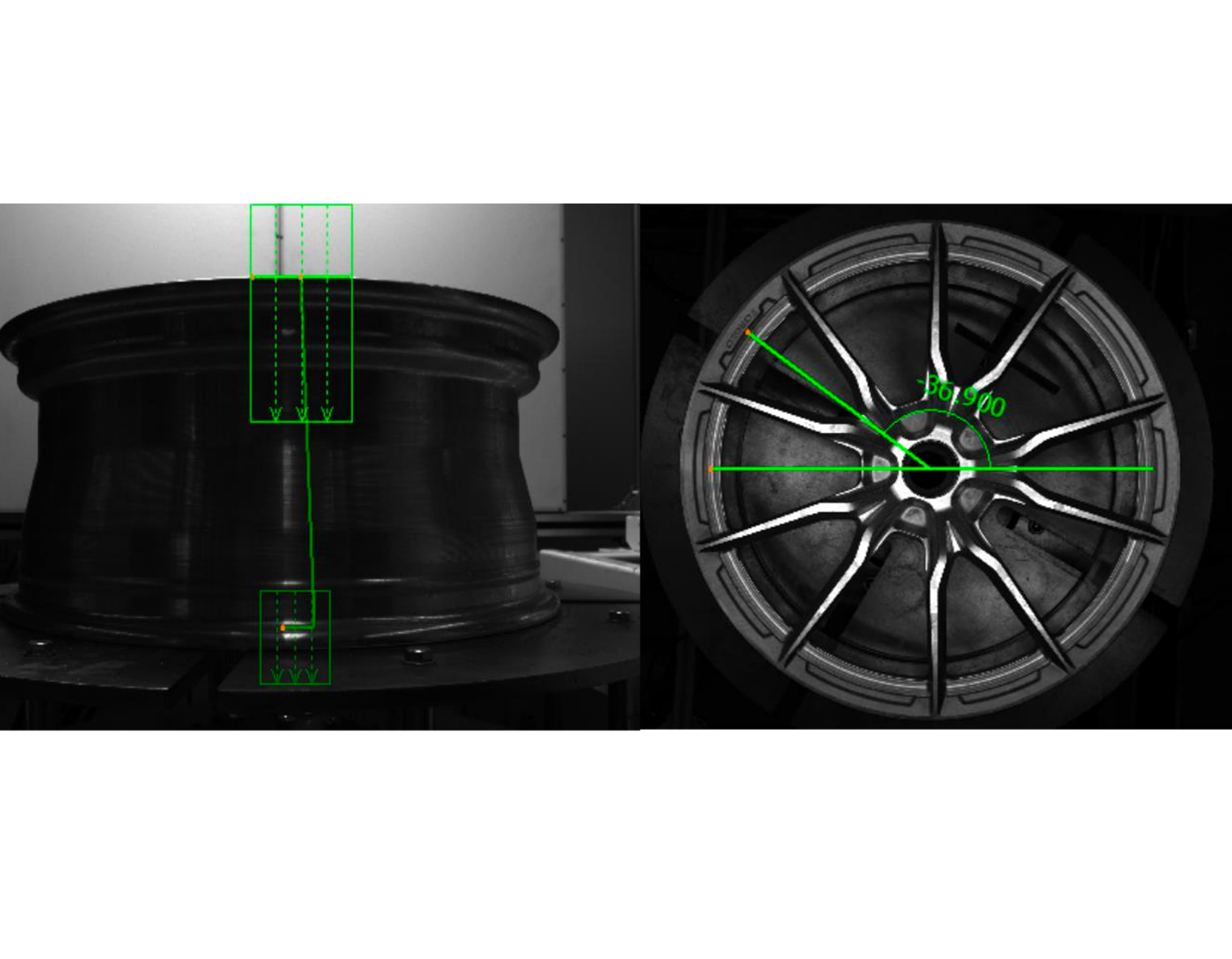
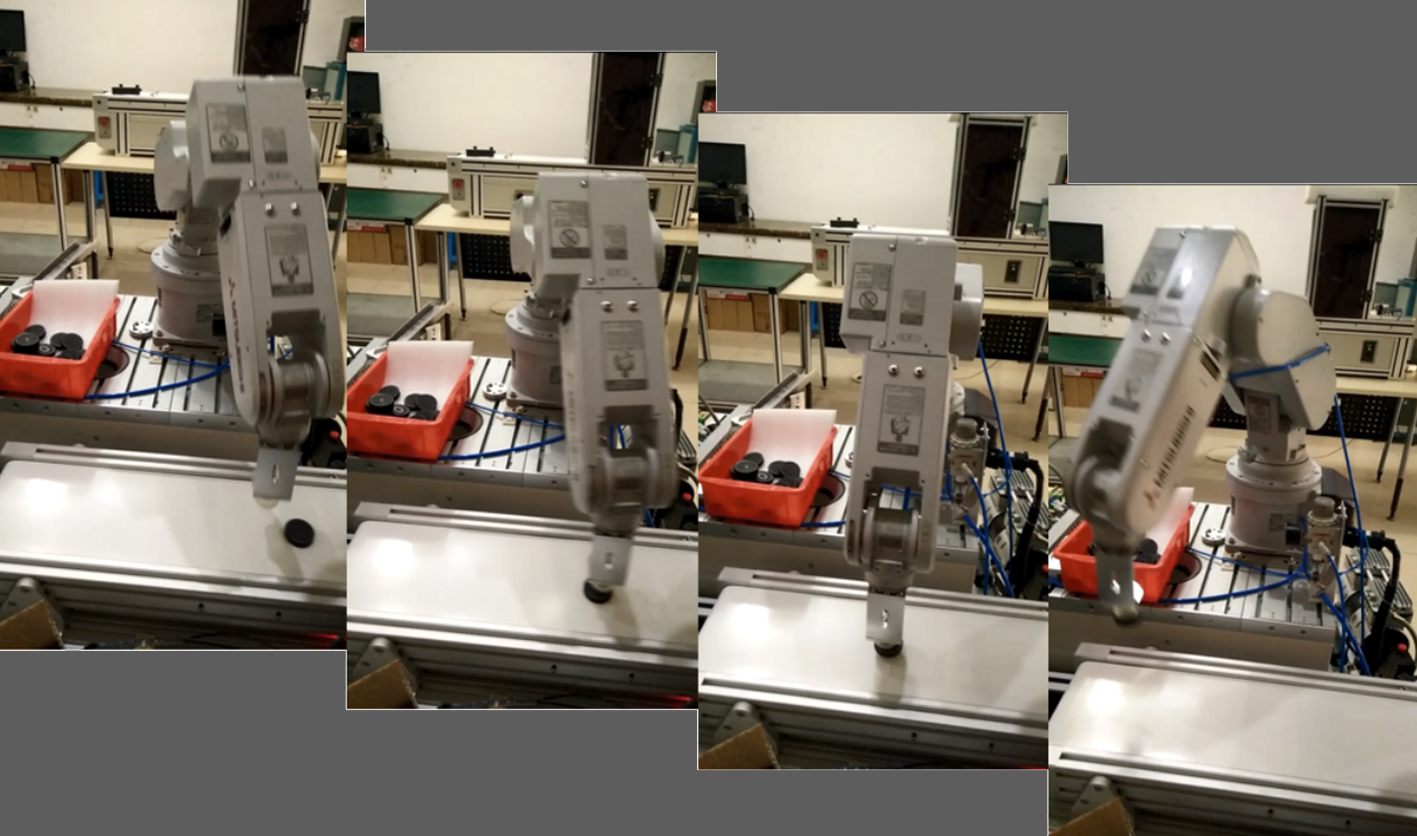
“眼”在“手”上多工位定位
相机安装在机械臂末端,机械臂可以在任意位置拍照定位
图例:随需拍摄“底座”或“贴片”进行定位
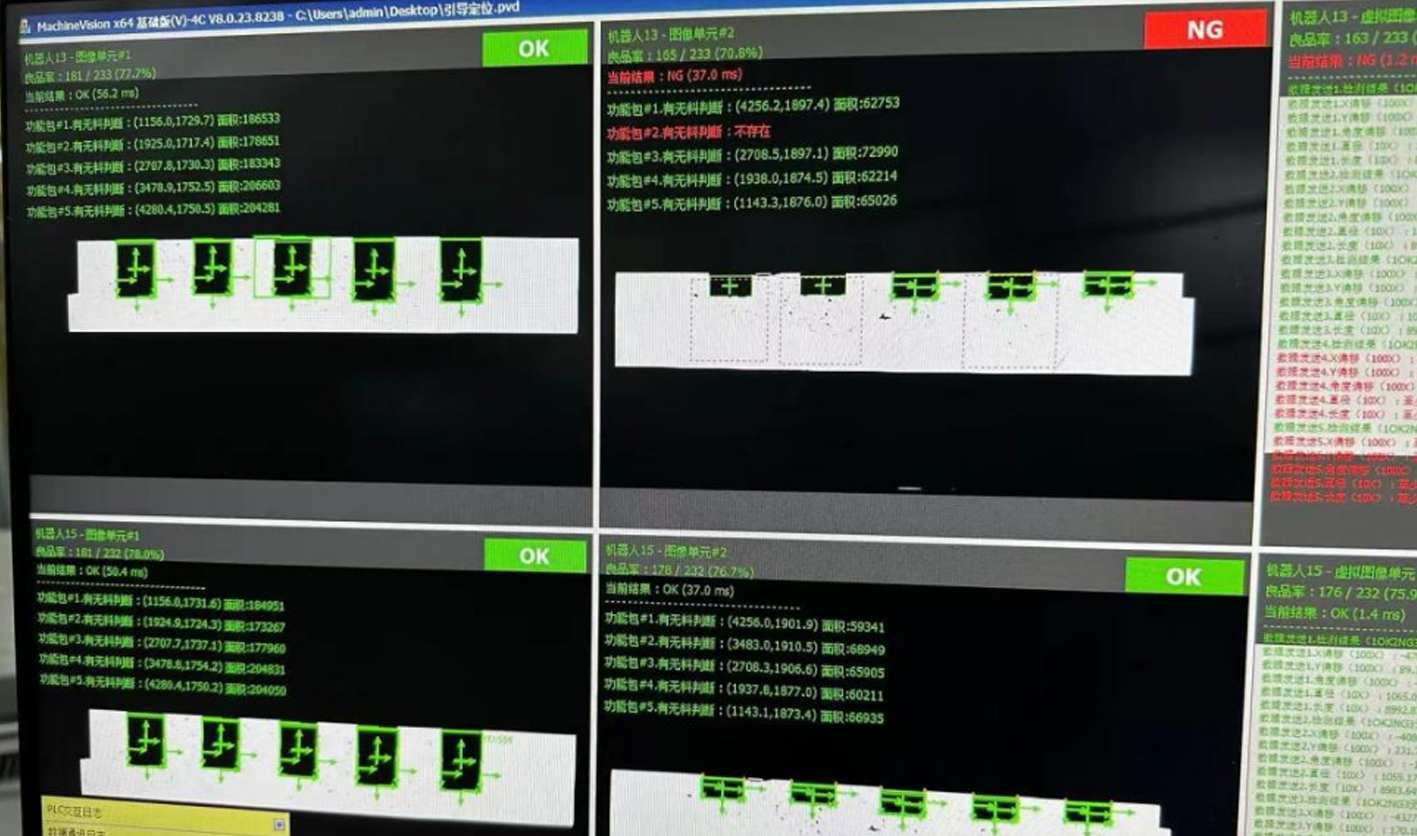
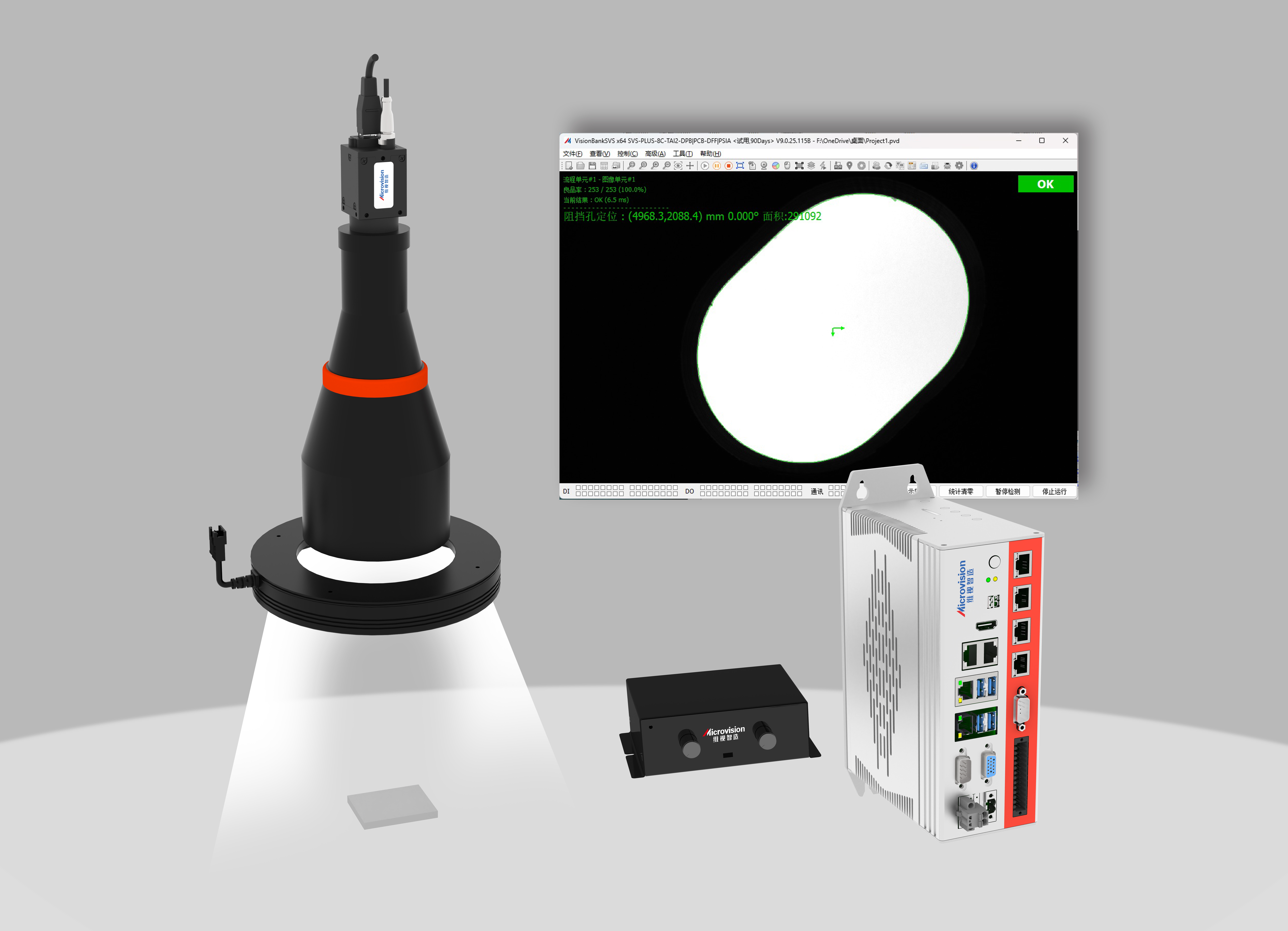
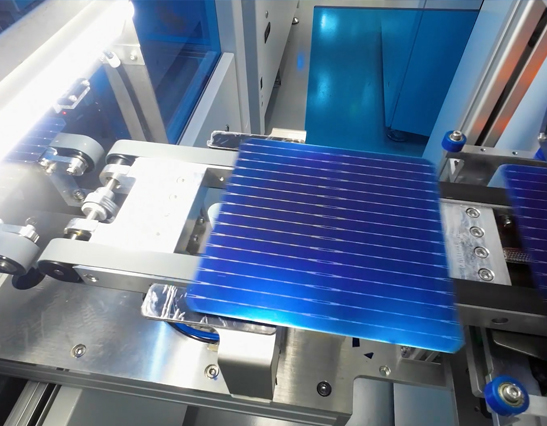
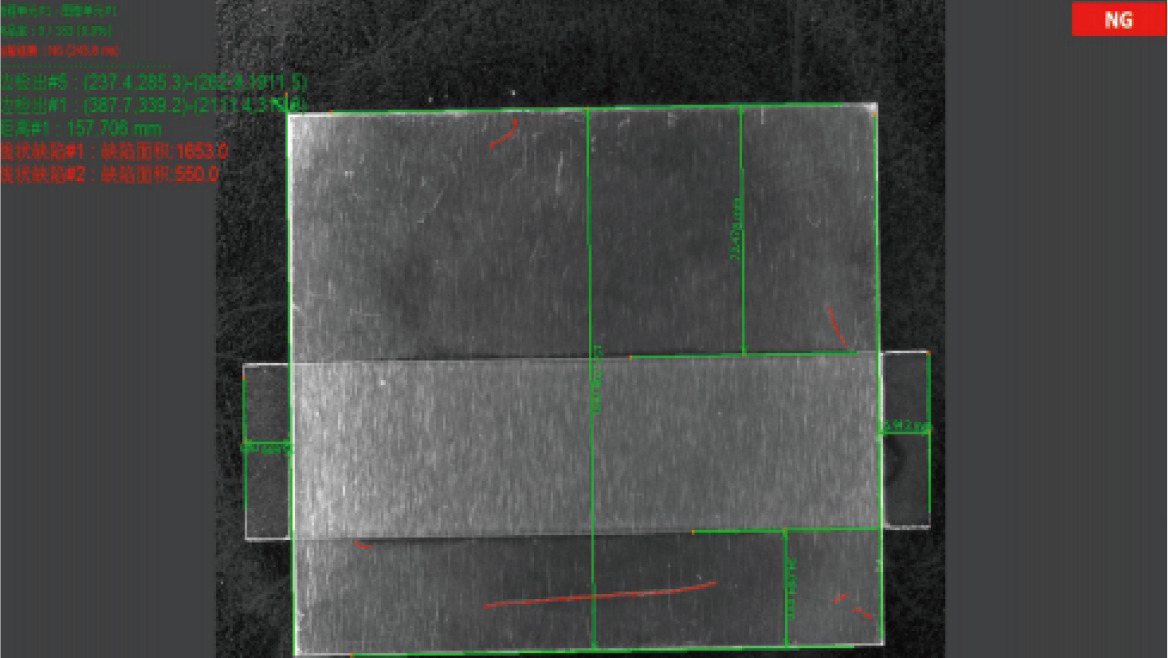
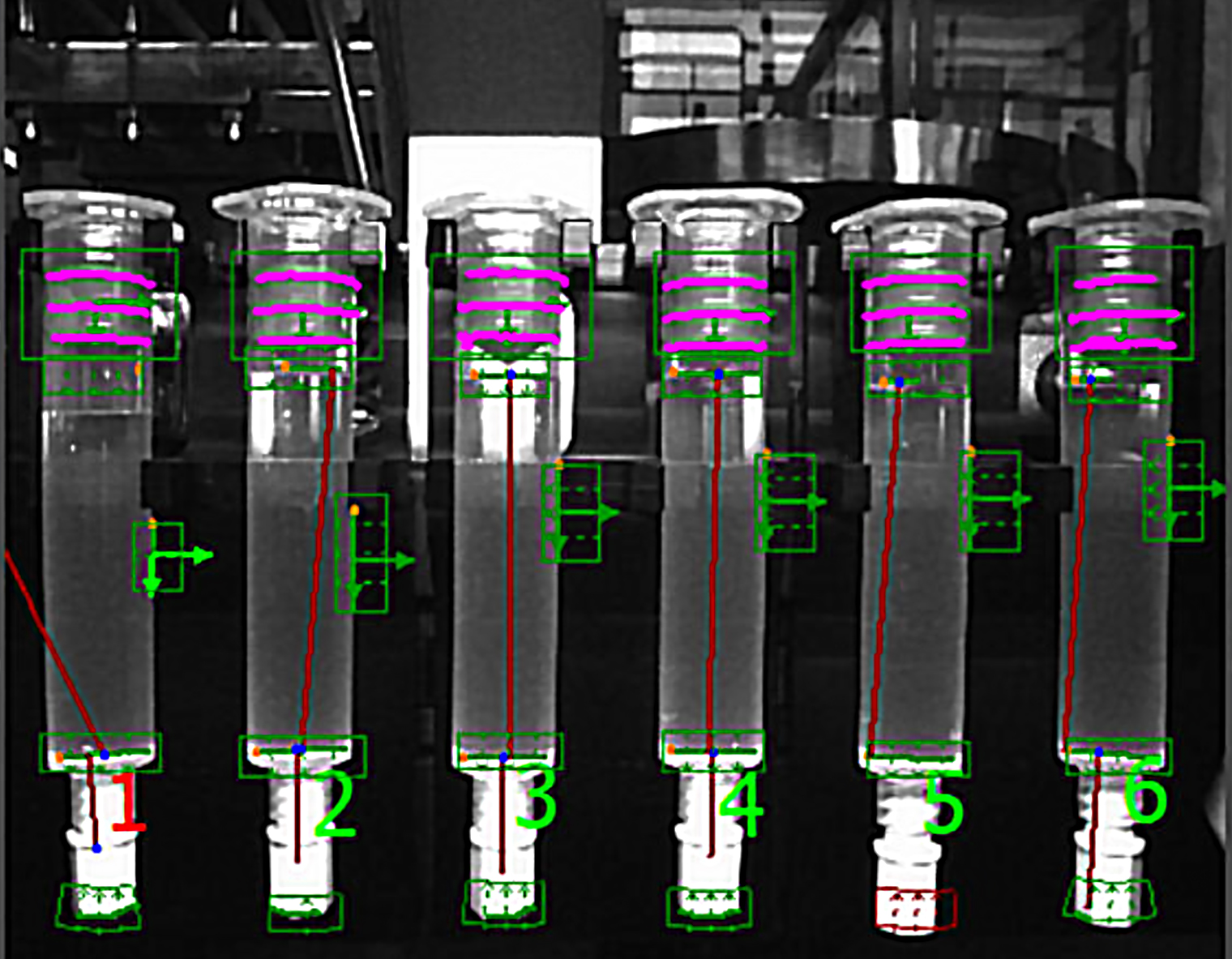
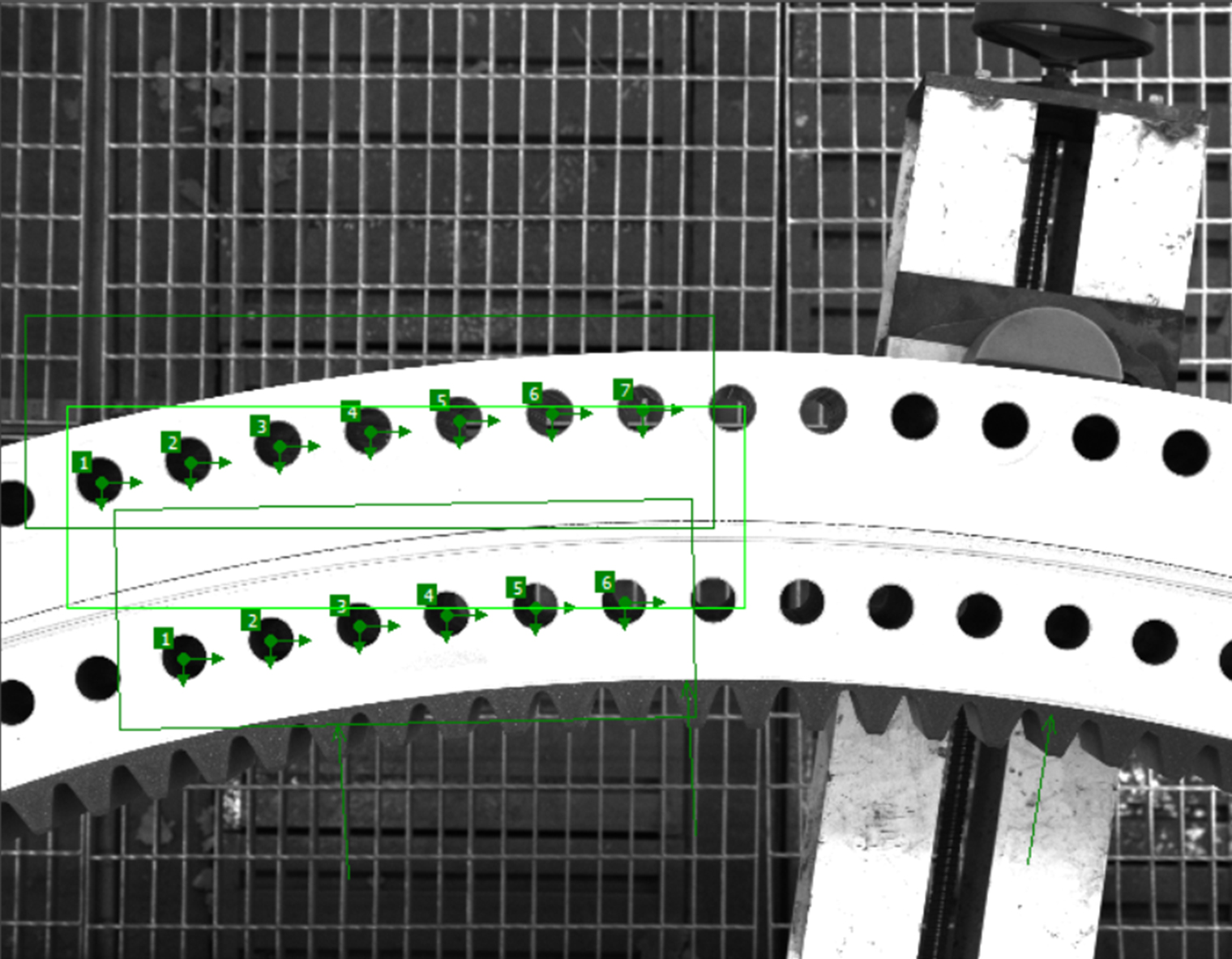
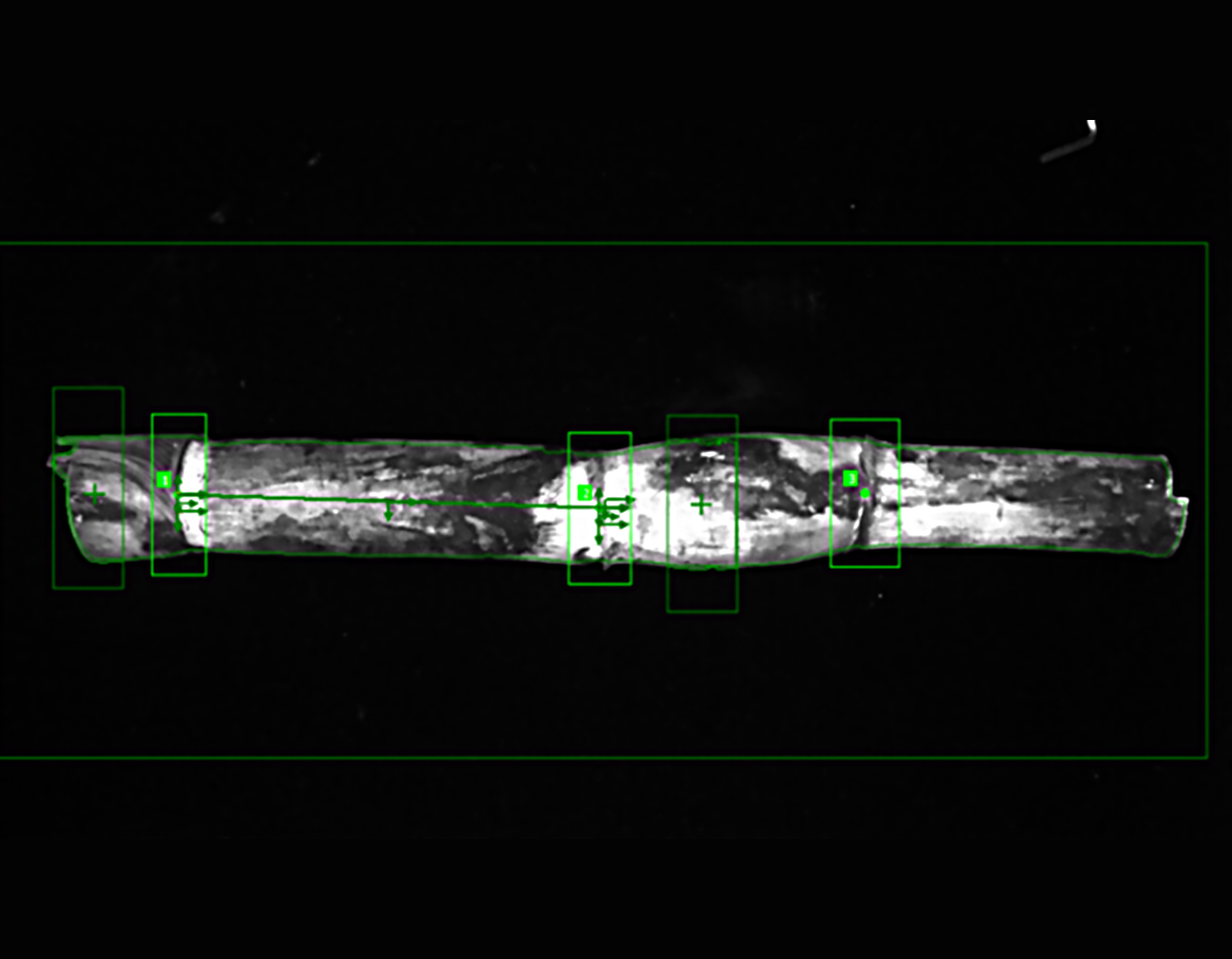
大尺寸产品定位
超1m长产品,定位精度要求0.5mm以下
图例:5款长度1.6m的产品,同时输出来料位置偏移给机器人
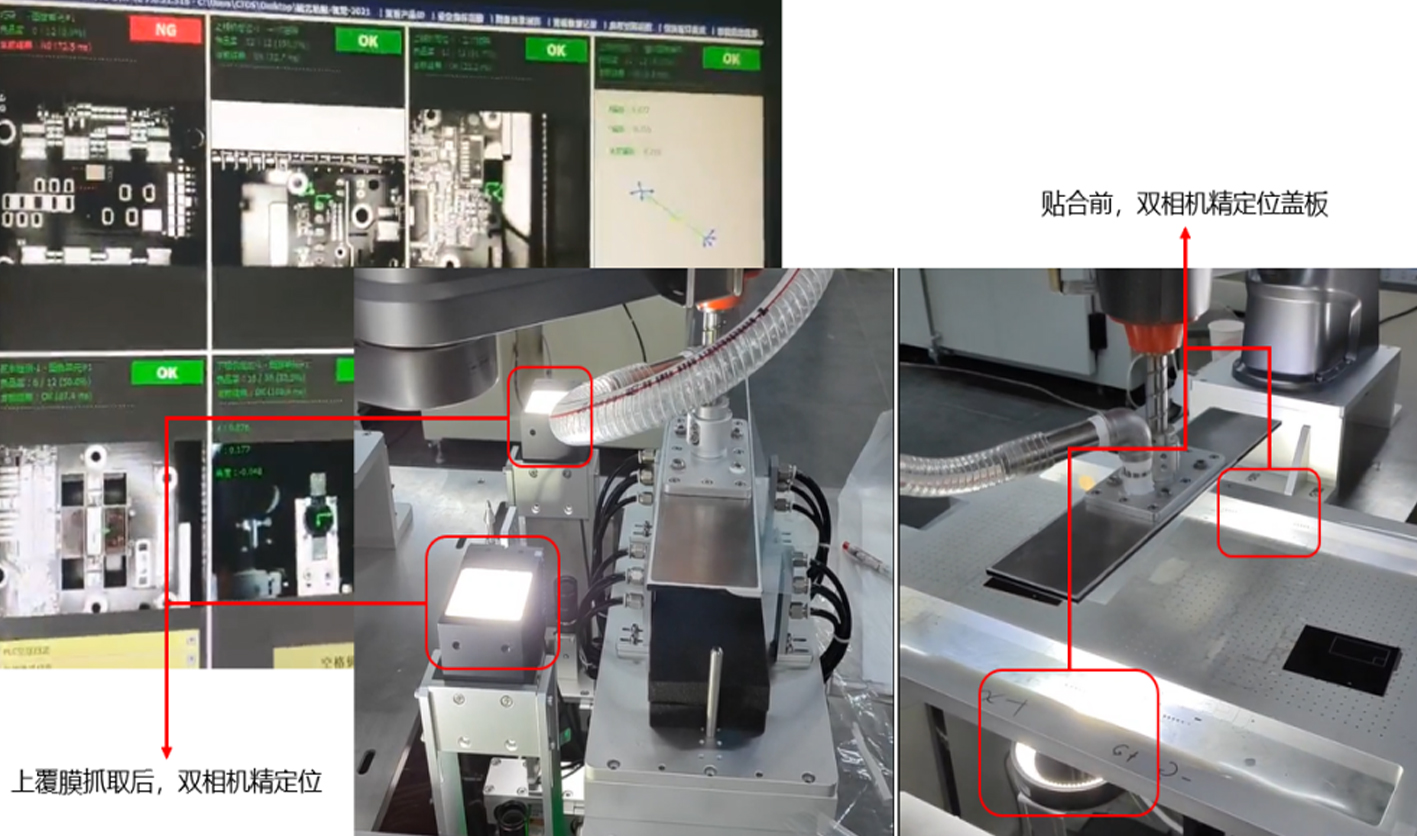
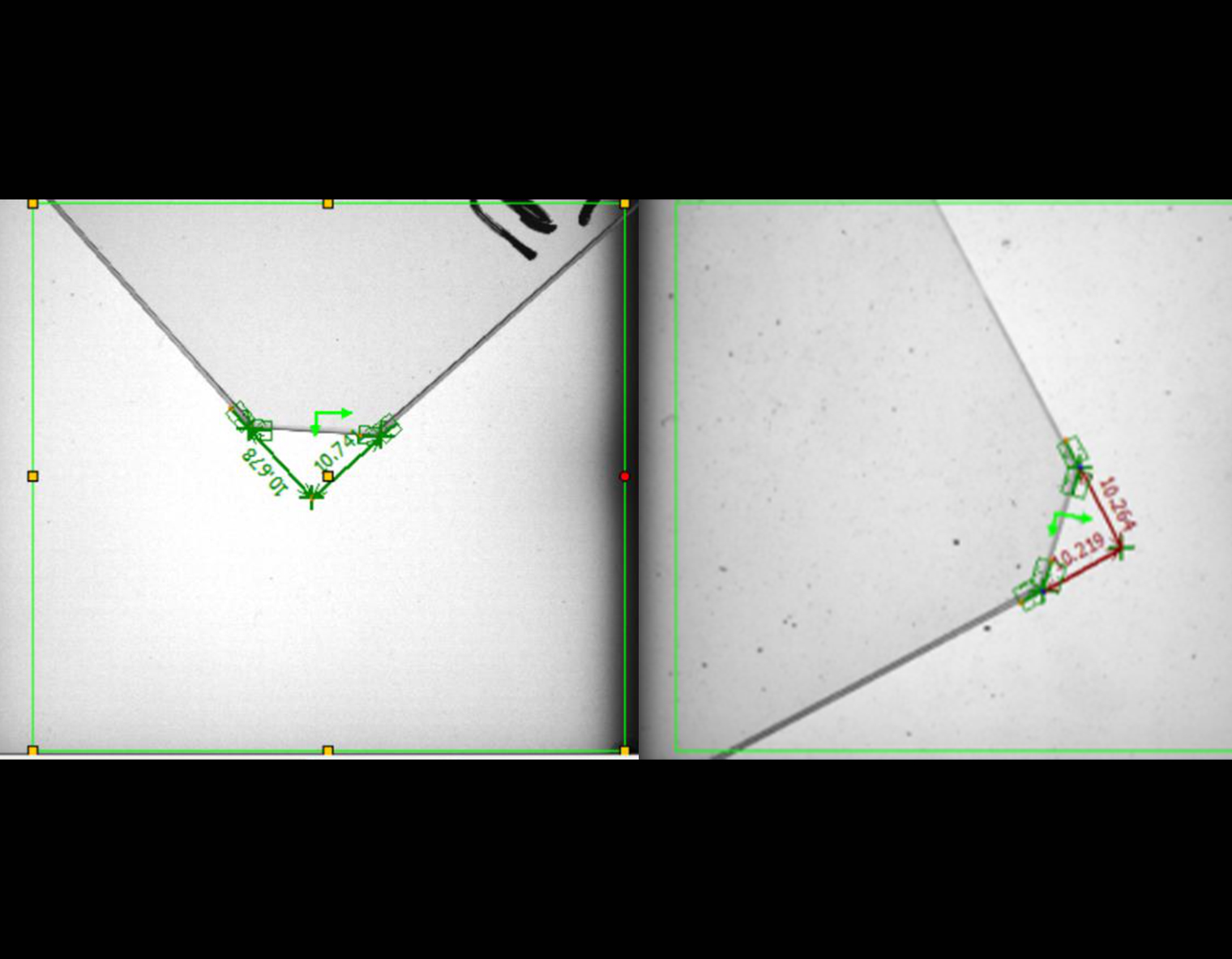
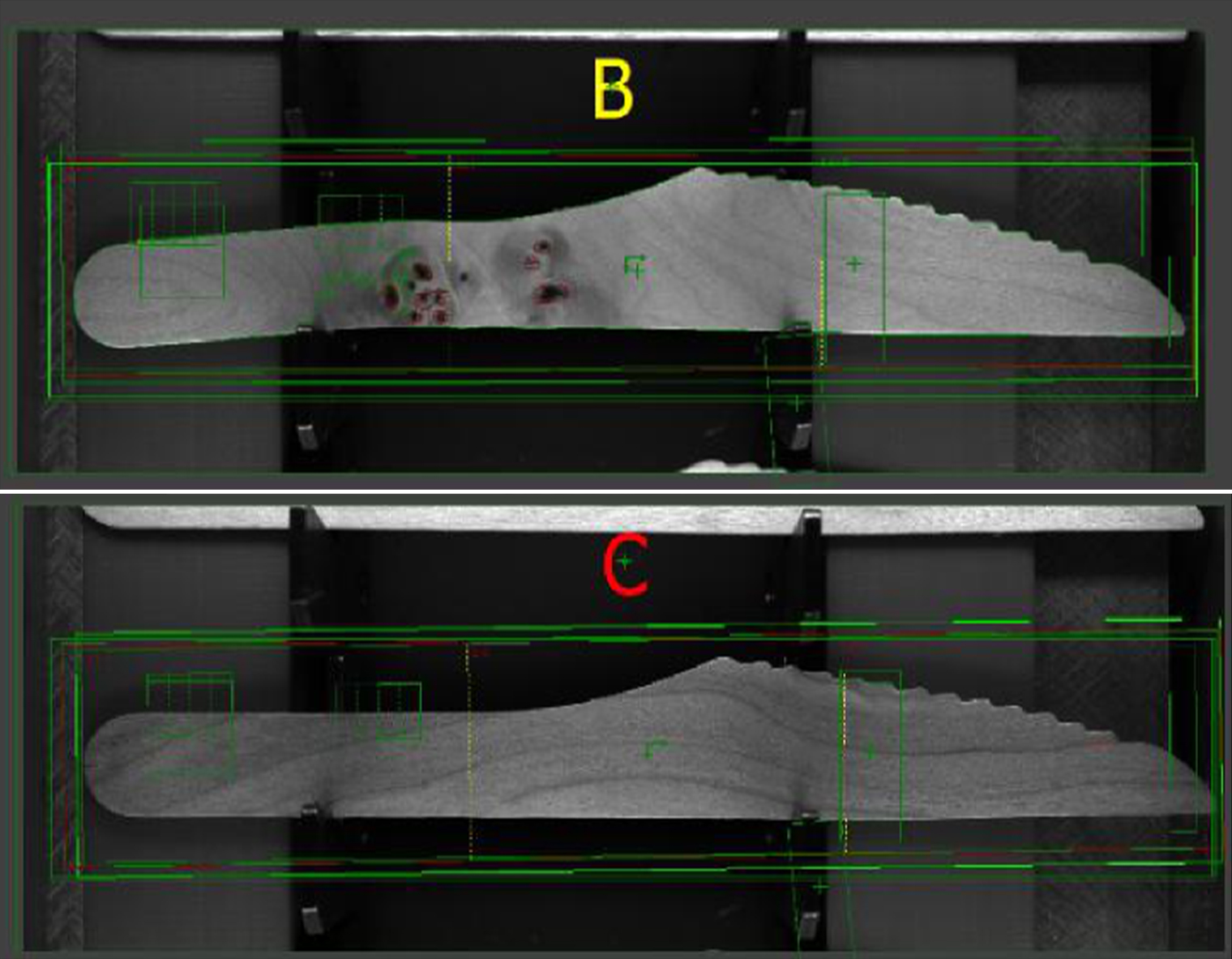
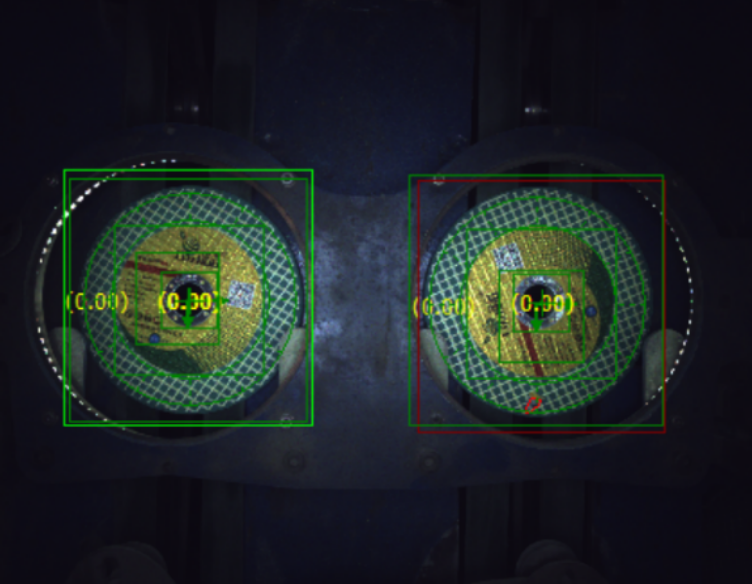
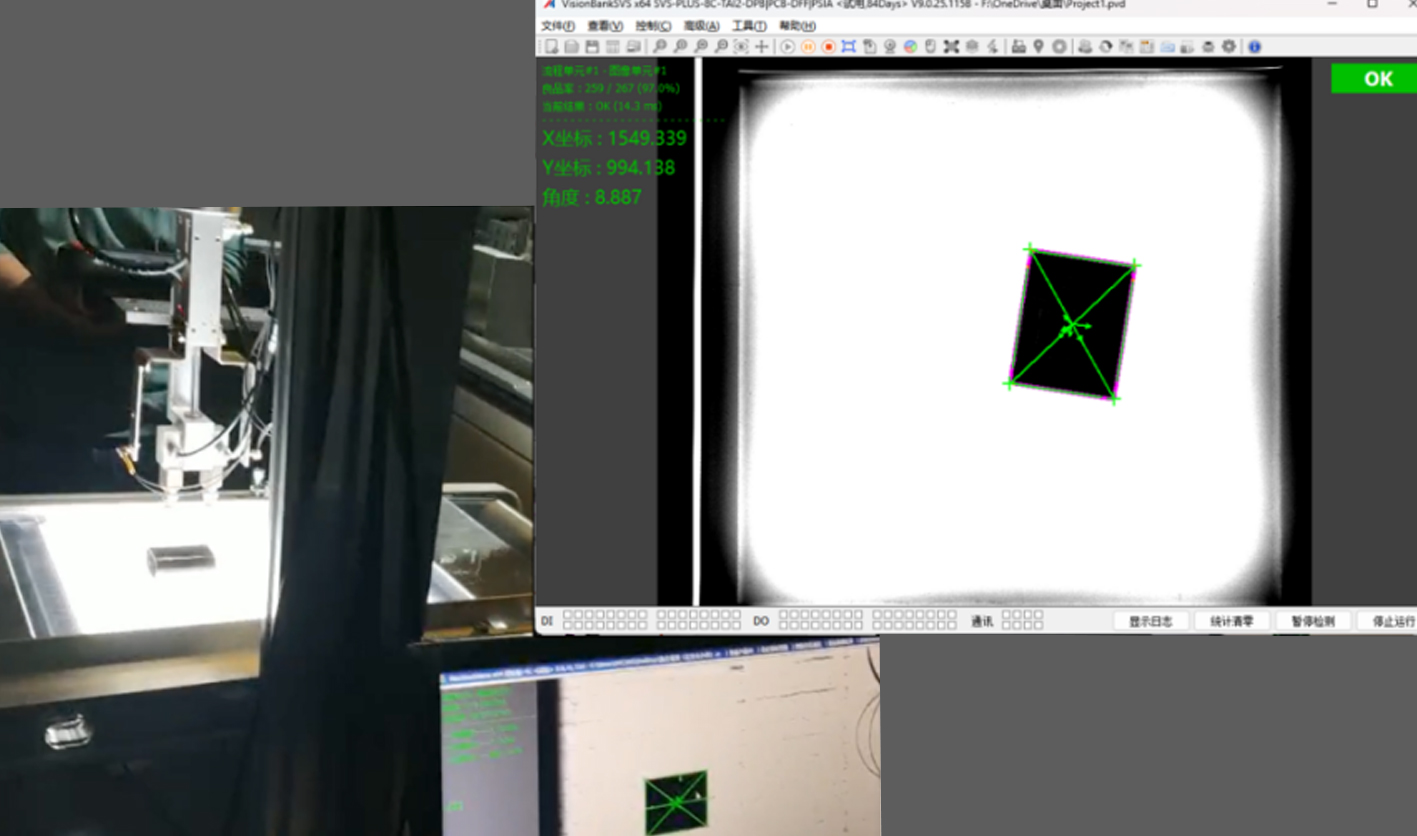
贴合对位
机械臂抓取料精定位
图例:被贴产品贴合前精定位,完成高精度贴合工艺
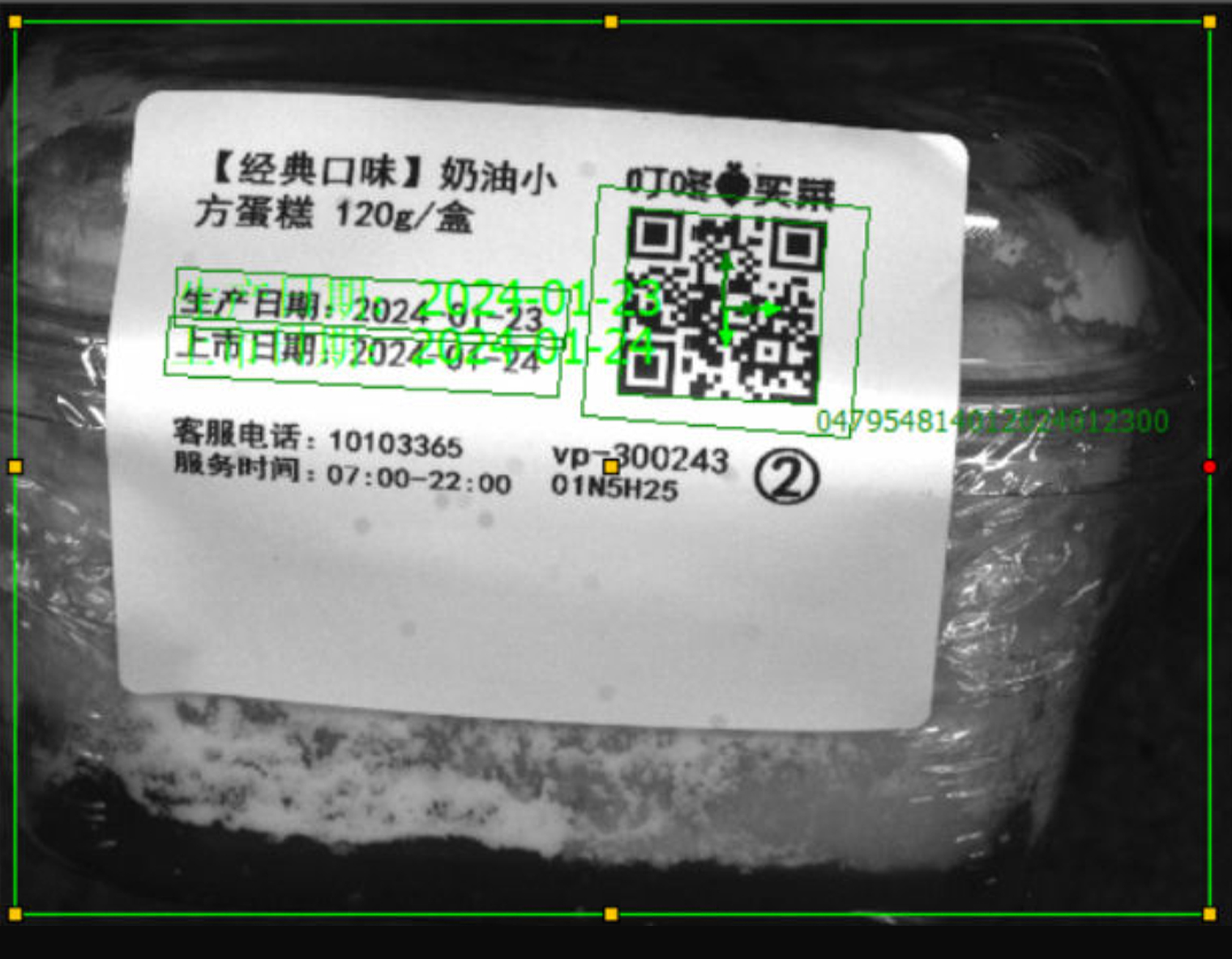
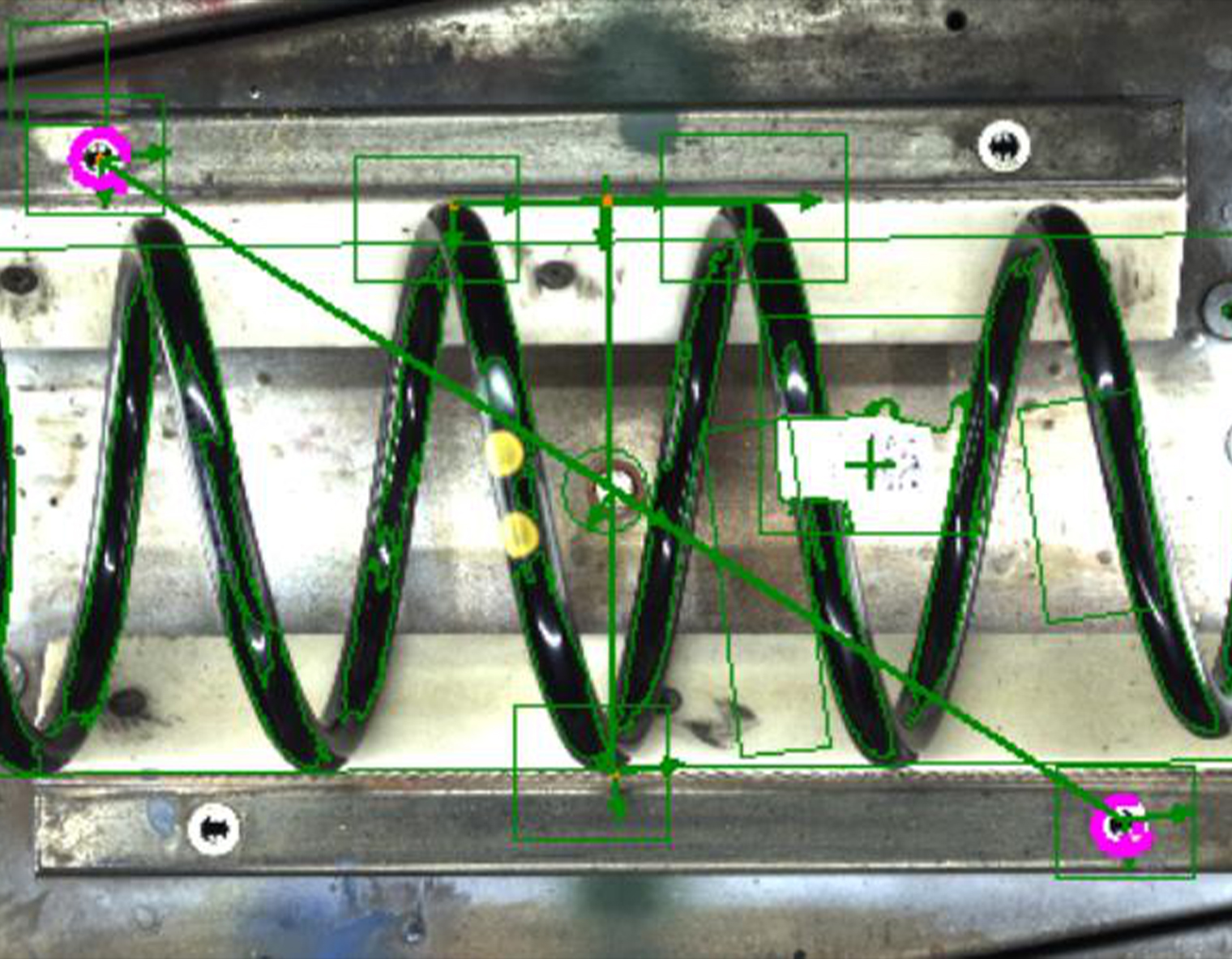
动态抓取定位
产品在移动过程中,视觉定位后机器人跟随抓取
图例:机械臂基于产品实时坐标的跟随抓取
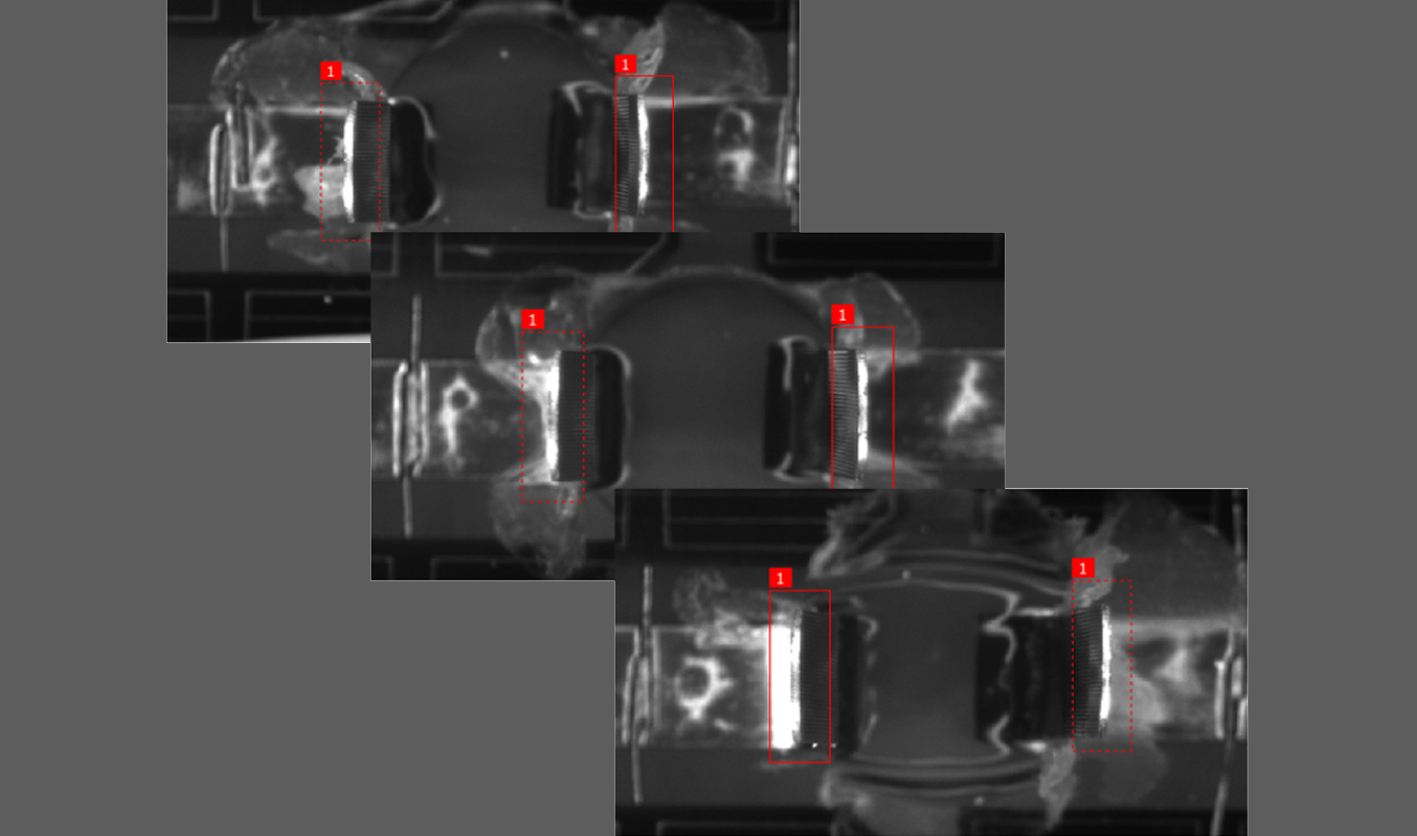
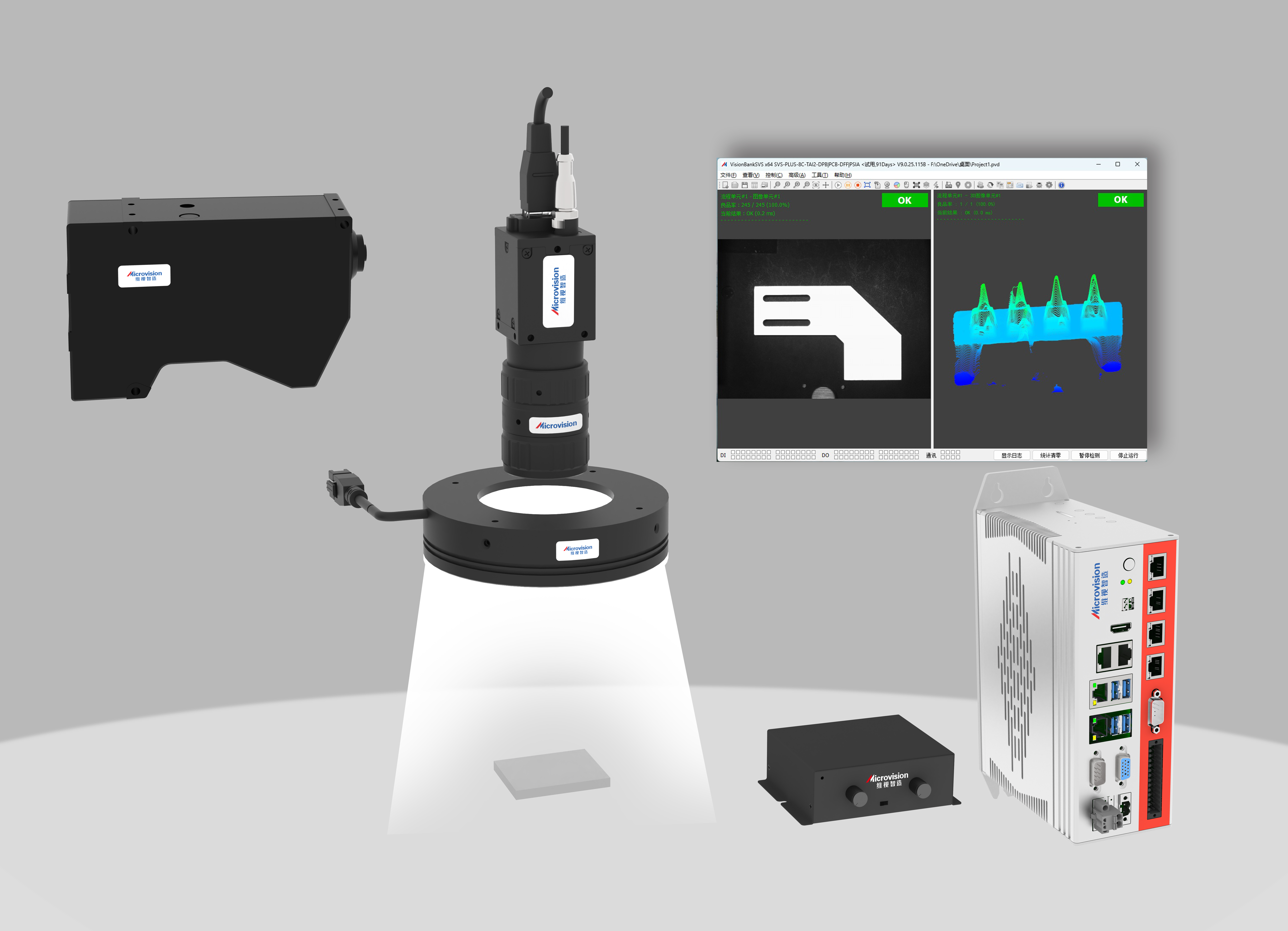
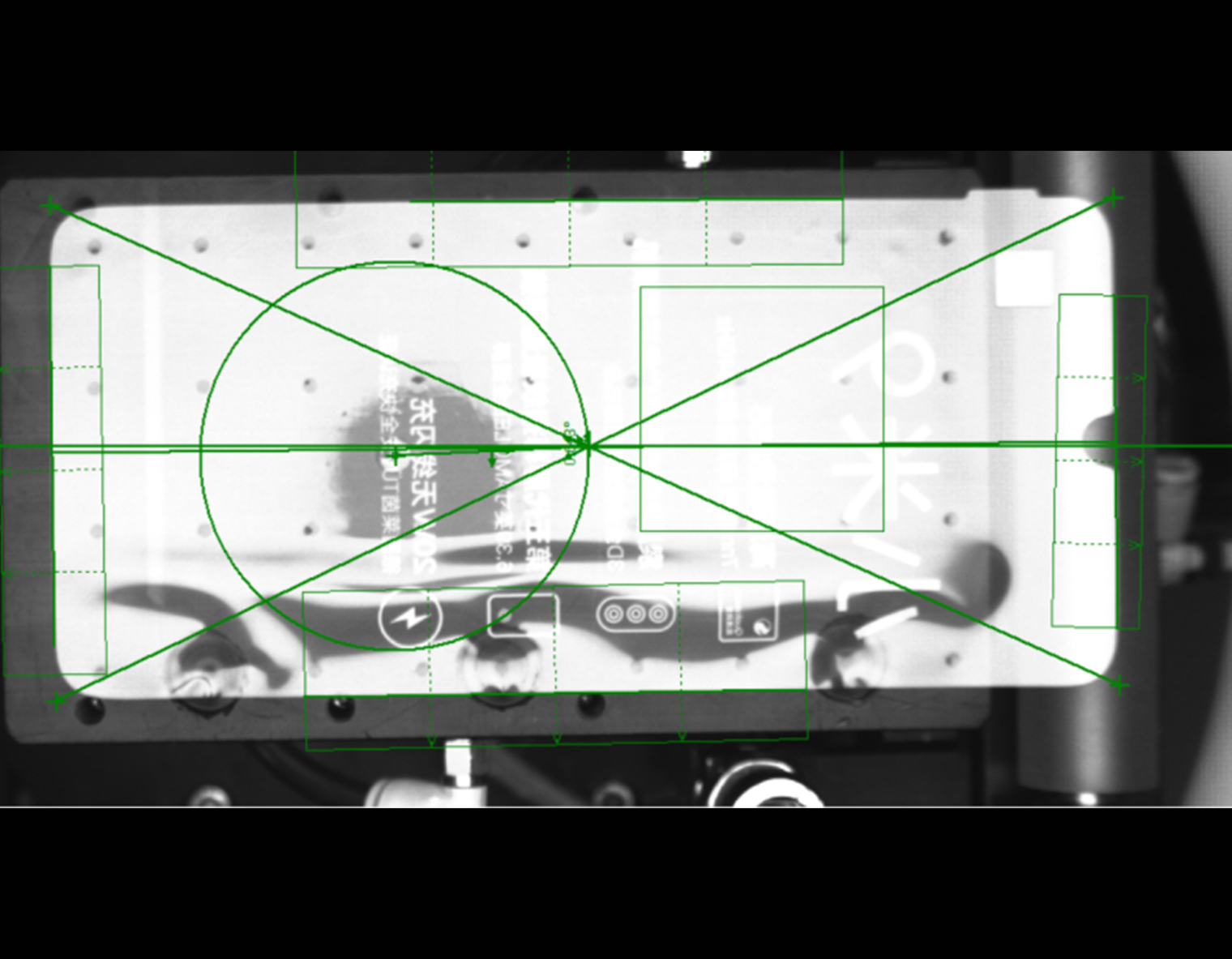
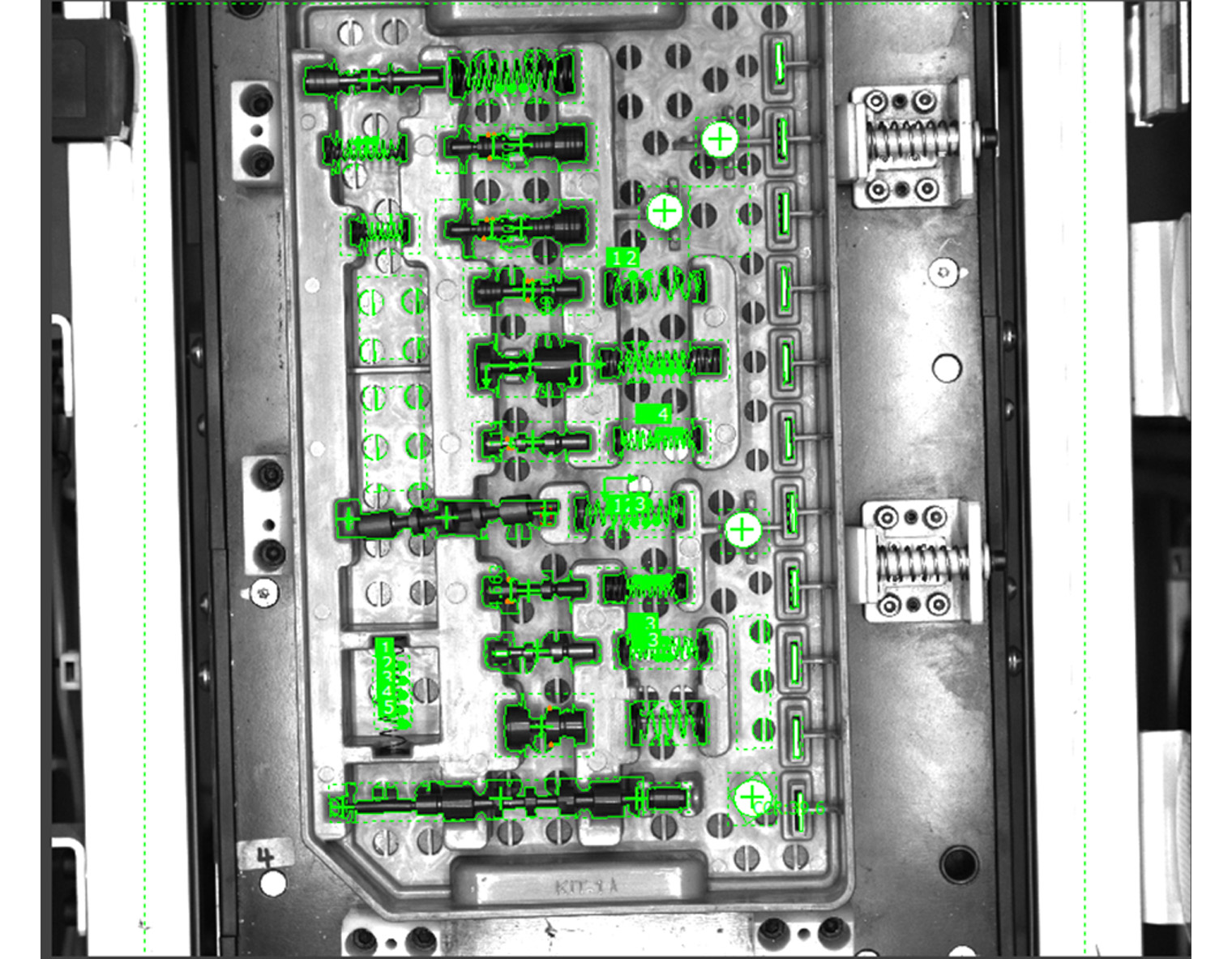
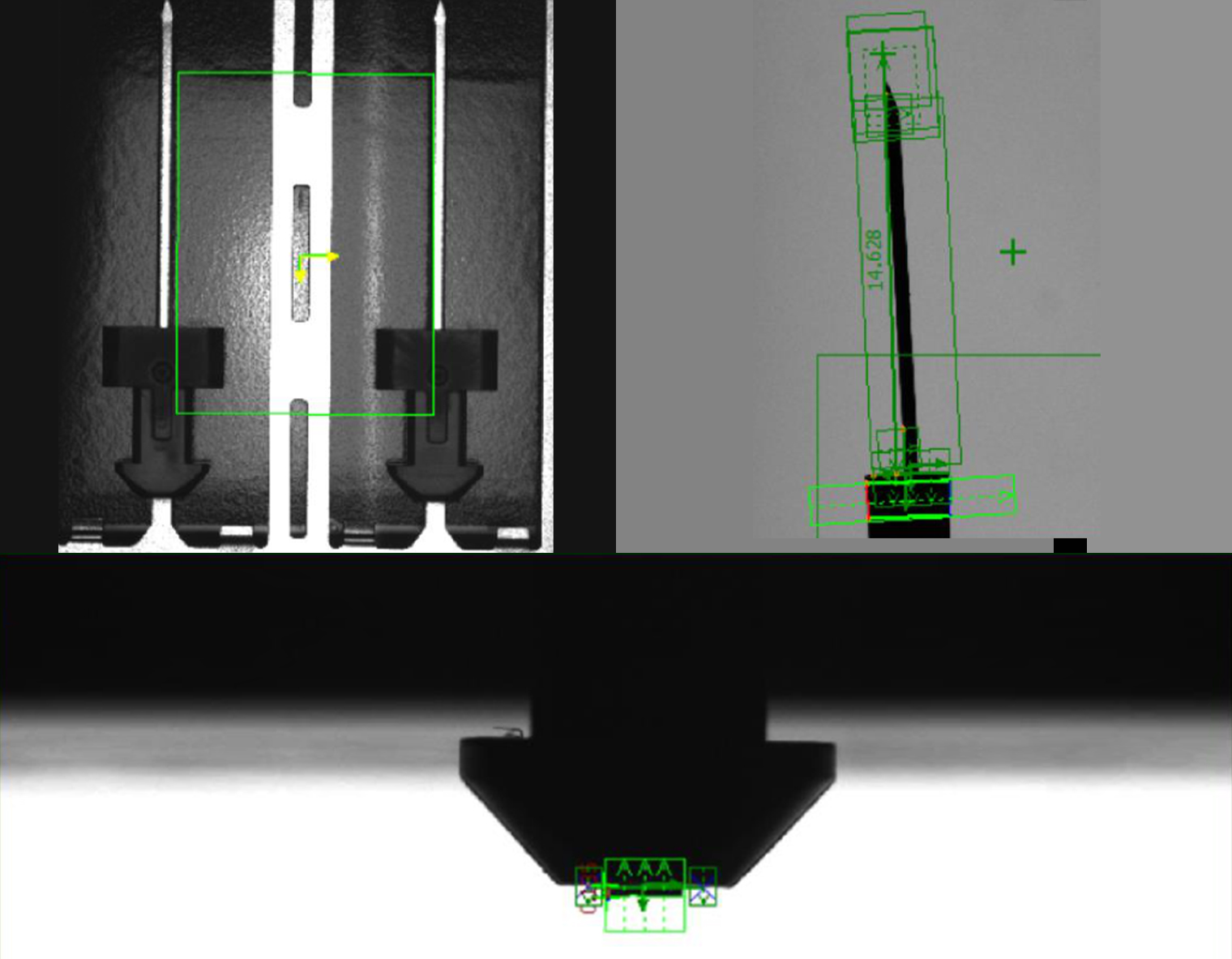
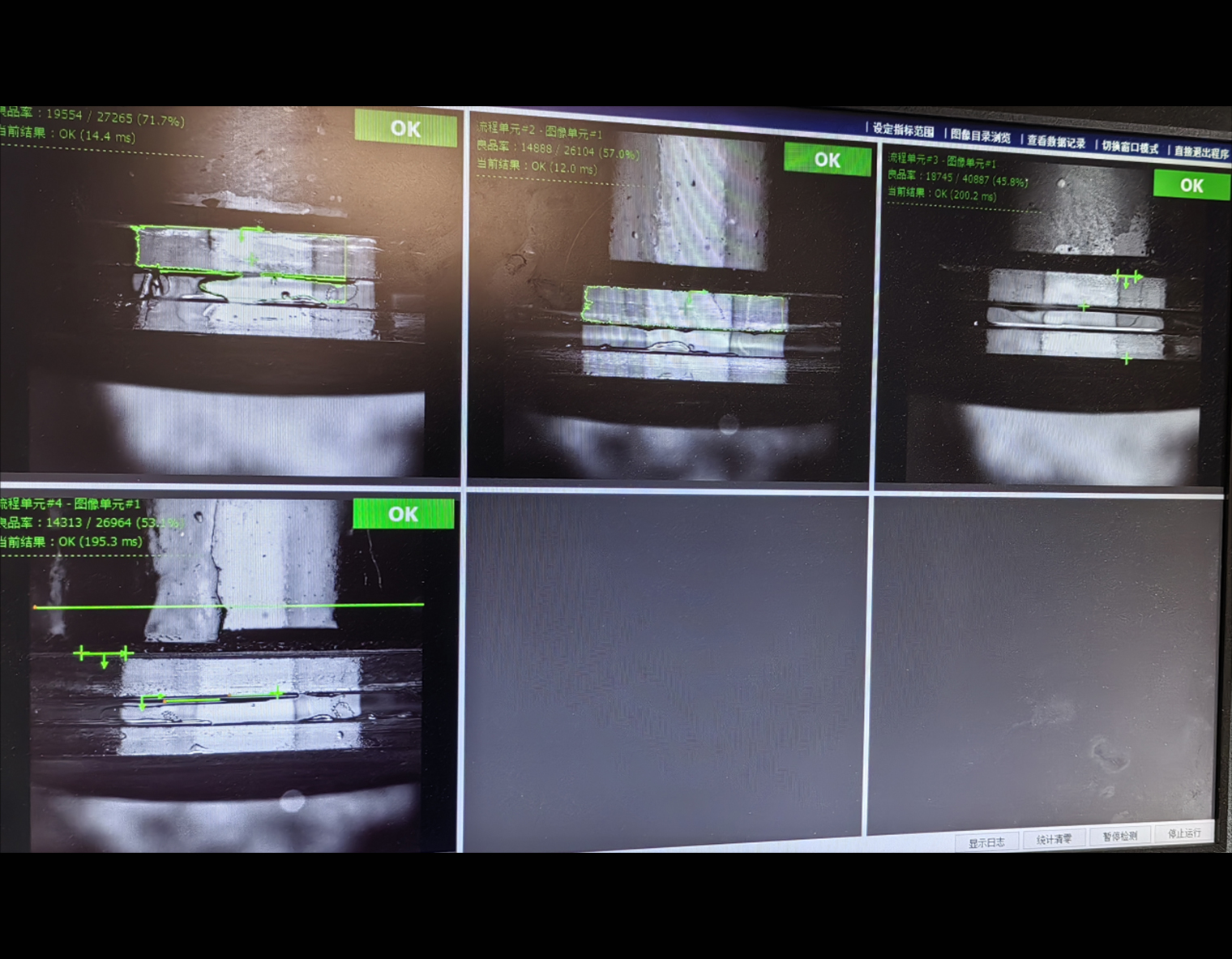
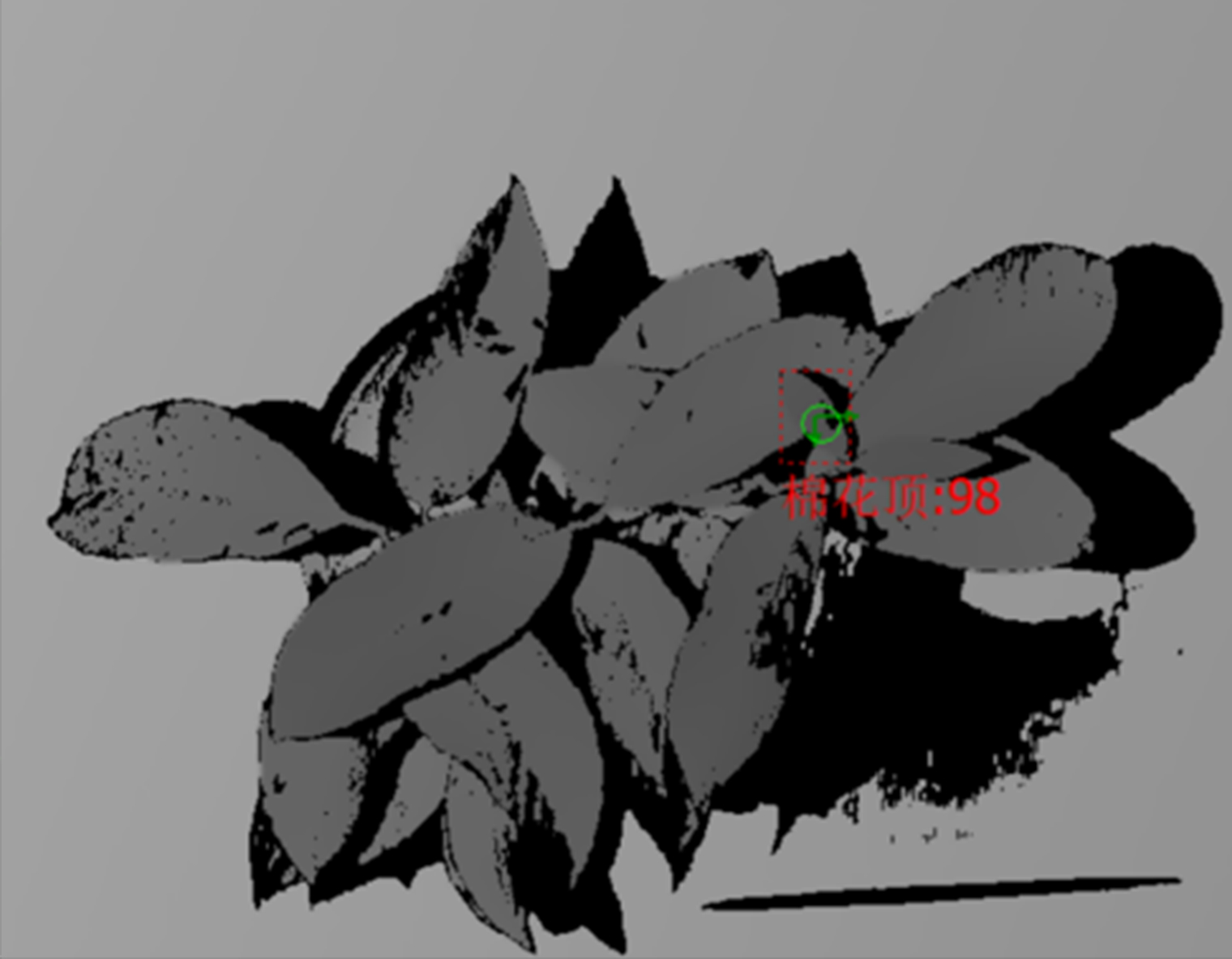
复杂对象AI定位
定位特征很难通过打光获取理想图像
图例:接线盒安装时的汇流条顶部AI定位
系统优势
紧凑设计
多模式标定
流程复用
可配置系统
协议兼容

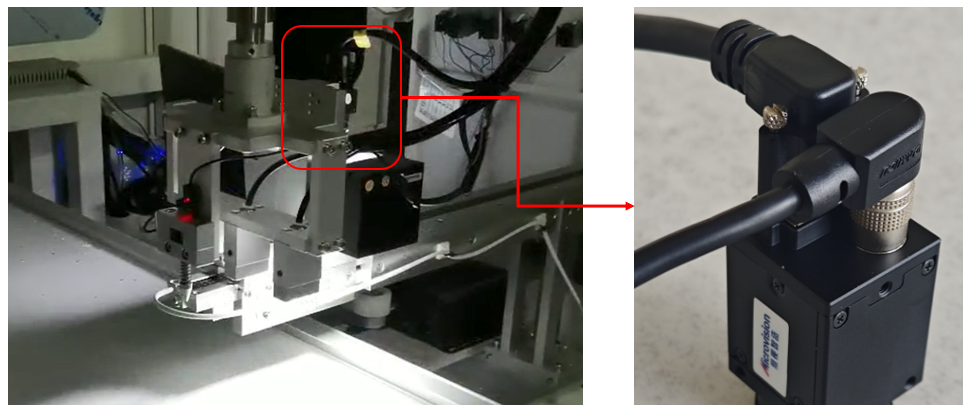
紧凑设计
紧凑设计,释放夹具空间
专为狭小空间设计的视觉定位系统,可配合机械臂及其他模组灵活安装,充分节省空间
图例:专用的“弯头”通讯线缆设计,更适合狭小空间布局
图例:专用的“弯头”通讯线缆设计,更适合狭小空间布局

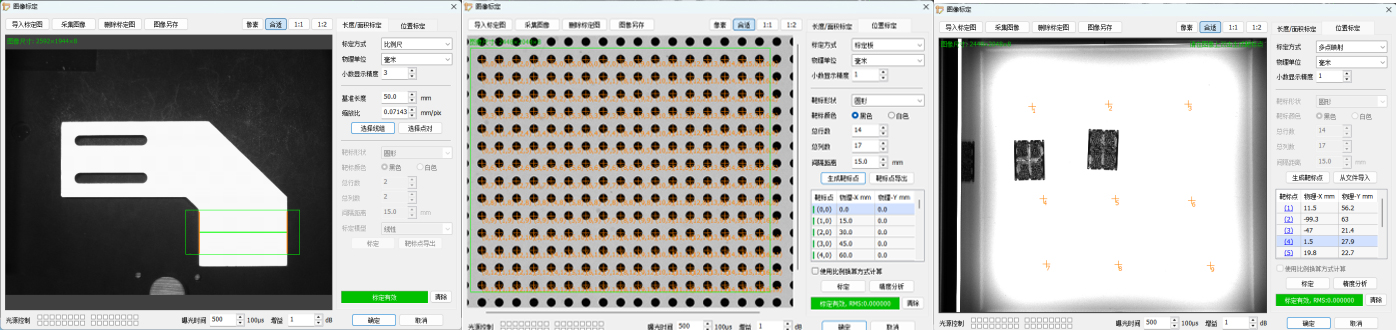
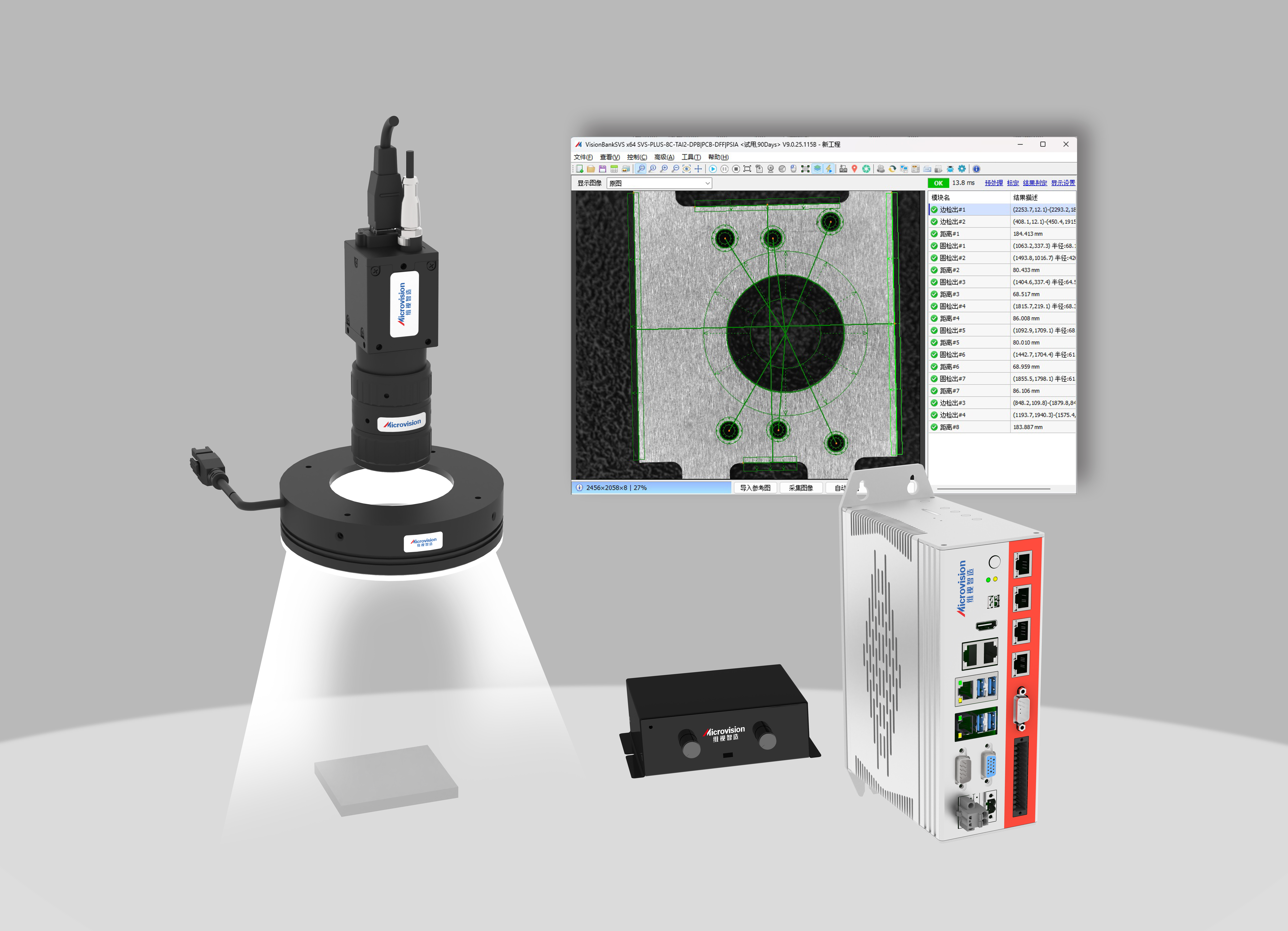
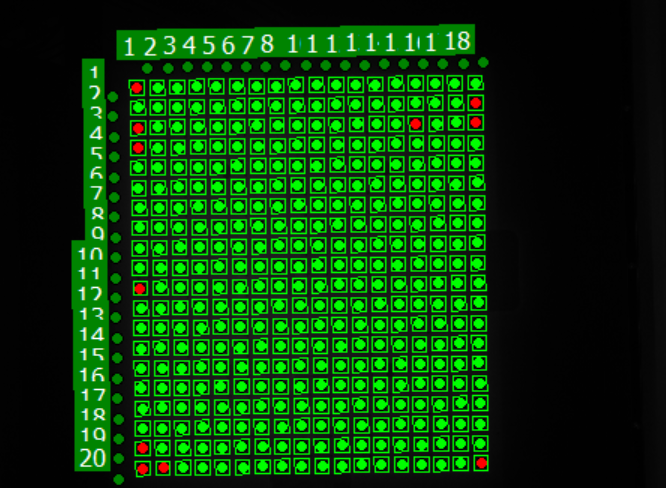
多模式标定
多模式标定,适配不同精度定位需求
比例尺标定:适用于定位精度不高,默认相机安装和XY轴相对平行的场景,2分钟即可完成标定
标定板标定:支持圆点、棋盘格和网格的自定义标定,适用对标定精度要求比较高的场景
多点映射标定——即“9点标定”,便捷方法获取标志物完成标定
标定板标定:支持圆点、棋盘格和网格的自定义标定,适用对标定精度要求比较高的场景
多点映射标定——即“9点标定”,便捷方法获取标志物完成标定
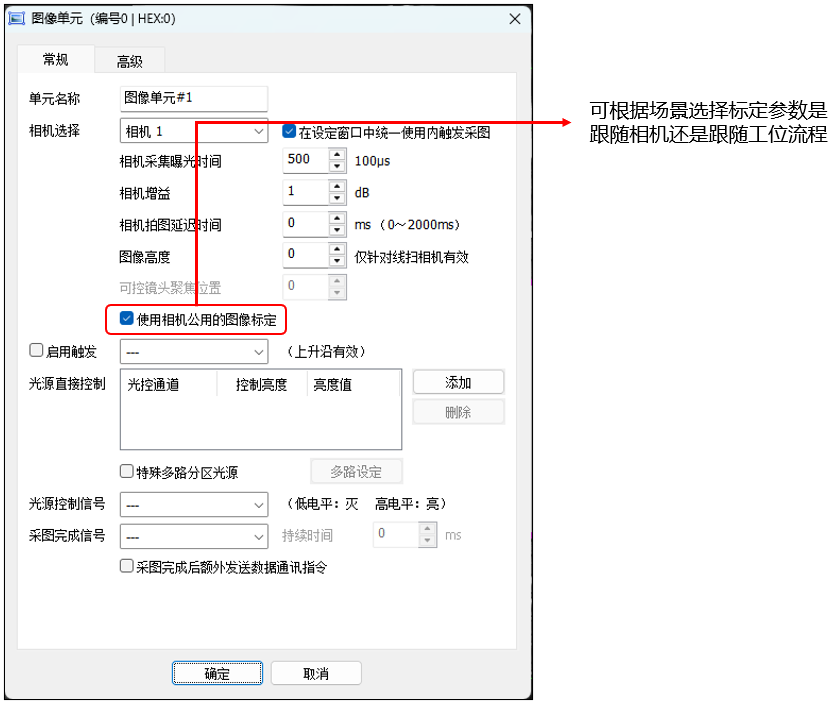
流程复用
不同工位同相机可多次定位
机械手视觉系统支持“流程复用技术”,相机在不同位置拍照可以使用不同的流程来执行,每个流程使用不同标定参数
可配置系统
可配置系统组合,标准之外更灵活
系统标配18款相机,50款FA镜头,30款双远心镜头
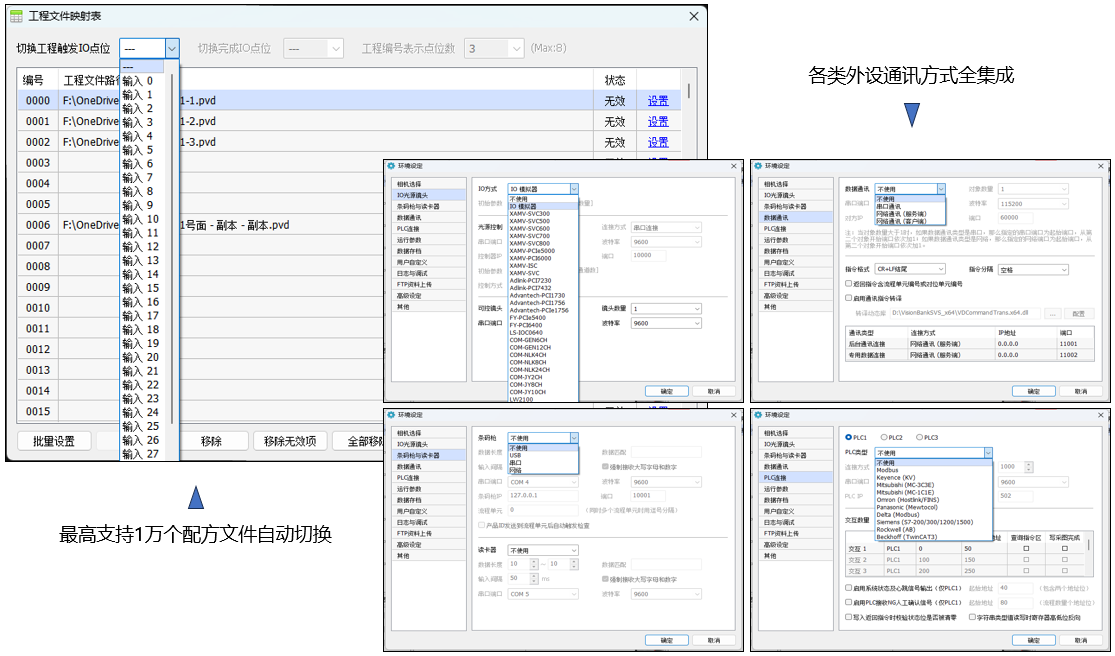
协议兼容
全协议兼容设计,支持10000+型号切换
系统标配协议包括:IO、TCP自由口、各种PLC协议、扫码枪、读卡器、光源控制器等,用户可以自由选择任何合适的外设跟其交互数据,同时支持最高1万个型号的自动切换
典型案例
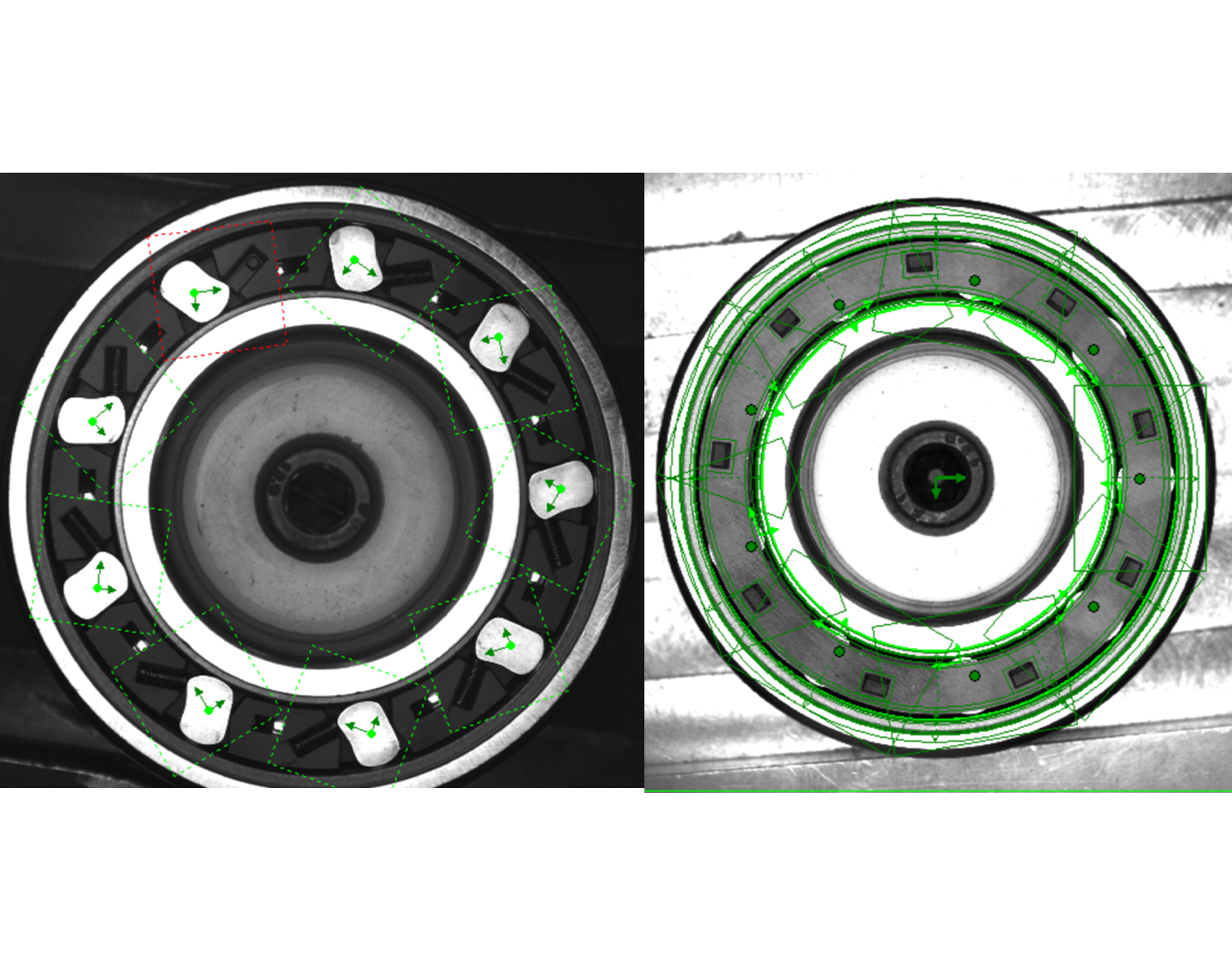
手机辅料贴合
本项目的“辅料”供料是“柔震盘”,机构需要精确定位盘上“辅料”位置,并引导模组完成贴合安装。项目的难点即需要视觉在取料前就精确定位。而该项目贴合机构的“旋转中心”和“吸盘中心”不重合,PLC控制系统又很难做“工具坐标系”标定,这些问题都需要视觉解决。采用维视机械手视觉系统,产品重复定位精度可达“像素级”,引导模组完成了精准贴合动作



 陕公网安备61019002003244号
陕公网安备61019002003244号










